 |
||||||||||||||||||||||||||
 |
 |
|
|
|||||||||||||||||||||||
 |
||||||||||||||||||||||||||
| Les característiques dels productes poden ésser modificades pel fabricant sense avís previ | ||||||||||||||||||||||||||
 |
|||||
 |
 |
||||
|
|||||
 |
Bombes Reversibles de Pinyons | Prospecte | ||
 |
Les bombes d'engranatges Octopus són bombes d'alta eficiència, líders en la indústria en eficiència, reduït consum; Silencioses, el seu nou disseny les aporta un funcionament significativament més silenciós; Lleugeres i compactes per afacilitar la seva ubicació en la instal·lació i amb una gama prou extensa en caudals i tensions. Pel seu silenci, alt rendiment i baix consum les fan òptimes pels velers. Aquestes prestacions ademés d'un preu ajustat, el poder-se utilitzar igual en pistons equilibrats que desequilibrats, permeten utilitzar-se en molts diversos tipus de vaixell. |

|
||
|
Càlcul de la mida de la bomba | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| |
Bombes Reversibles Ajustables | |||||||
| Prospecte | ||||||||
 |
Aquest grup de bombes d'Octopus permeten l'ajust del flux. Aquest ajust permet optimitzar-la pel pistó i pels requeriments del pilot automàtic i del vaixell i això, junt amb la reducció de les fugues d'oli que tenen les bombes d'engranatges, fa que el consum d'energia es redueixi fins a la meitat alhora que s'augment en la precisió de la posició del timó i l'eficiència del pilot. Normalment a Europa s'utilitzen les connexions tipus SAE, però estan també disponibles amb les connexions més utilitzades a Amèrica les NPT. Al moment de fer la comanda cal indicar el tipus de connexió que es necessitarà. |
|
||||||
| Si dubta de la mida de bomba que li convé pel seu vaixell, piqui la icona PDF de la dreta per veure la fórmula que li permetrà fer el càlcul. | ||||||||
|
Càlcul de la mida de la bomba |
|||||||
| Model /Codi | Enroscats* | Tensió (V) | Consum Mig*1 / Pic (A) | Flux Ajustable (Cm3/min) | Per Mida Cilindre (Cm3) | Gràfic | Mides AxBxC (mm) | Pes (Kg) | PVP (€) |
| OCTAF1012NPT | NPT | 12 | 6 ̴ 8 / 25 | 500 ̴ 1.000 | 80 ̴ 280 | 195x114x100 | 4 | ||
| OCTAF1212NPT | NPT | 12 | 6 ̴ 8 / 25 | 600 ̴ 1.200 | 100 ̴ 350 | 195x114x100 | 4 | ||
| OCTAF2012NPT | NPT | 12 | 7 ̴ 9 / 25 | 1.000 ̴ 2.000 | 200 ̴ 460 | 220x114x100 | 4,5 | ||
| OCTAF1024NPT | NPT | 24 | 3 ̴ 4 / 12 | 500 ̴ 1.000 | 80 ̴ 280 | 220x114x100 | 4 | ||
| OCTAF1224NPT | NPT | 24 | 3 ̴ 4 / 12 | 600 ̴ 1.200 | 100 ̴ 350 | 220x114x100 | 4 | ||
| OCTAF2024NPT | NPT | 24 | 4 ̴ 5 / 12 | 1.000 ̴ 2.000 | 200 ̴ 460 | 220x114x100 | 4,5 | ||
| OCTAF1232NPT | NPT | 32 | - ̴ - / - | 600 ̴ 1.200 | 100 ̴ 350 | - | -x-x- | 4 | sota comanda |
| OCTAF2032NPT | NPT | 32 | 4 ̴ 5 / - | 1.000 ̴ 2.000 | 200 ̴ 460 | - | -x-x- | 4,5 | sota comanda |
| * Per obtenir rosca SAE, utilitzeu eljoc d'adaptadors OC17215-3 │ *1 Mantenint el rumb amb cicle de treball 15% | |||||||||
| |
Bomba Reversible Ajustable amb Vàlvula de Bypass | ||||
| Prospecte | |||||
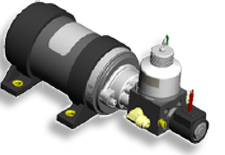 |
Aquestes bombes reversibles incorporen una vàlvula de 'bypass' (de pas a través) i un dipòsit que les fan útils per a ser emprades amb cilindres que no formen part del sistema de govern hidràulic del vaixell. La finalitat de la vàlvula és lliurar el pistó de manera que quan actuï el sistema de govern manual, aquest no ofereixi resistència. Al connectar aquestes bombes a un pistó compatible es forma un sistema hidràulic-lineal per atacar a la canya o al sector. Es poden emprar amb cilindres des-balancejats* (desequilibrats) fent servir el joc de vàlvula des-balancejada o desequilibrada que és fàcil d'instal·lar. |
|
|||
| * Un cilindre balancejat és el que treu mànec accionador pels dos extrems. Si només en treu per la punta d'atac, llavors és un cilindre des-balancejat o desequilibrat. | |||||
| Model /Codi | Enroscats* | Tensió (V) | Consum Mig*1 / Pic(A) | Pressió Màxima (bar/Psi) | Flux Ajustable (Cm3/min) | Per Mida Cilindre (Cm3) | Gràfic | Mides*3 AxBxC (mm) | Pes (Kg) | PVP (€) |
| OCTAF1012BP12 | SAE | 12 | 6 ̴ 8 / 25 | 70 / 1.000 | 500 ̴ 1.000 | 80 ̴ 280 | 195x114x100 | 5 | ||
| OCTAF1212BP12 | SAE | 12 | 6 ̴ 8 / 25 | 70 / 1.000 | 600 ̴ 1.200 | 100 ̴ 350 | 195x114x100 | 5 | ||
| OCTAF2012BP12 | SAE | 12 | 7 ̴ 9 / 25 | 55 / 800 | 1.000 ̴ 2.000 | 200 ̴ 460 | 220x114x100 | 5,5 | ||
| OCTAF1024BP12 | SAE | 24 | 3 ̴ 4 / 12 | 70 / 1.000 | 500 ̴ 1.000 | 80 ̴ 280 | 220x114x100 | 5 | ||
| OCTAF1224BP24 | SAE | 24 | 3 ̴ 4 / 12 | 70 / 1.000 | 600 ̴ 1.200 | 100 ̴ 350 | 220x114x100 | 5 | ||
| OCTAF2024BP24 | SAE | 24 | 4 ̴ 5 / 12 | 60 / 900 | 1.000 ̴ 2.000 | 200 ̴ 460 | 220x114x100 | 5,5 | ||
| * Si bé l'estàndard europeu és SAE, es poden subministrar amb l'enroscat NPT americà si així es demana │ *1 Mantenint el rumb amb cicle de treball 15% │*3 les mides no inclouen la vàlvula de bypass | ||||||||||
| Accessori | necessari en pistons desequilibrats amb bombes de flux variable. | |||||||||
| 17SUK03 | Vàlvula Desequilibrada / Des-balancejada | |||||||||
|
|
||||
|
|||||
| |
Unitats Hidràulic-Lineals per a Velers i Motores | ||||
| Prospecte | |||||
| 1 |  |
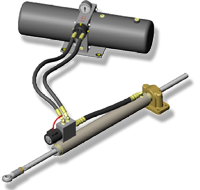
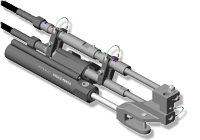
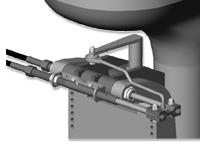
Les unitats hidràuliques-lineals estan compostes del cilindre equilibrat i la electro-bomba d'Octopus constituint un conjunt autònom que converteix les decisions del pilot automàtic en posicions precises del timó. Es presenten en dos formats, les adossades i les remotes o separades; en les primeres, bomba i pistó formen un bloc que es fixa a la canya o al sector i a una part fixa del casc contra la que farà la força, en les remotes la bomba està separada del cilindre alliberant espai en la zona del quadrant i donant més llibertat per la ubicació de la bomba. |
|
||
| 2 |  |
Aquestes unitats de força són ideals pels velers ja que fan estalvi de bateria respecte als sistemes clàssics amb bombes de pinyons. La eficiència rau en el fet que el moviment del braç és més proporcional al temps que rep potència i no recula ni pràcticament redueix el moviment per causa de la resistència del timó, els sistemes amb bombes de pinyons redueixen el recorregut per unitat de temps així que augmenta la resistència del timó de manera que el pilot ha de mantenir alimentada la bomba més temps per assolir la mateixa posició del timó. A més, al poder ajustar el flux de la bomba, es pot ajustar la velocitat de gir del timó segons les necessitats del vaixell i així optimitzar el govern del pilot al veler. |
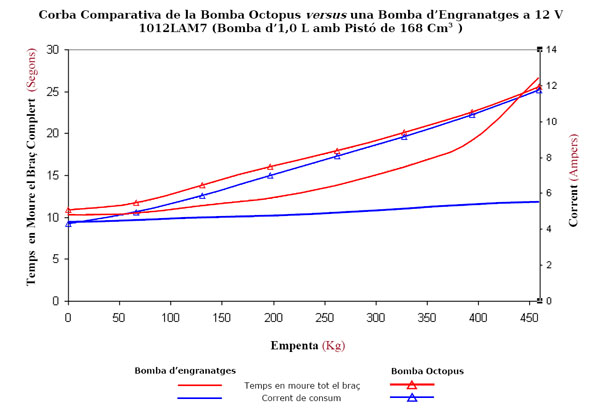 Gràfic comparatiu Octopus / altres |
||
| 1- Sistema Adossat 2 - Sistema Separat |
| Model / codi | Acoblament bomba/pistó | Tensió (V) | Consum normal / Pic (A) | Accionador / Elevació (Ømm/ mm) | Braç Pistó (mm/") | Braç Canya (mm) | Parell (Nm) | Empenta màxima (Kg) | Desplaçament /eslora màxima (Tones /m/peus) |
Ajust del Flux (litres/min) | Temps Topall /Topall recomanat | Pes (Kg) | PVP (€) |
| AF1012LAM7 | Adossat | 12 | 5 ̴ 7 / 19 | 16 / 38 | 178 / 7 | 150 | 750 | 400 | 10 / 14 / 45 | 0,5 ̴ 1 | 12 ̴ 14 | 8 | |
| AF1012LAR7 | Separat | 12 | 5 ̴ 7 / 19 | 16 / 38 | 178 / 7 | 150 | 750 | 400 | 10 / 14 / 45 | 0,5 ̴ 1 | 12 ̴ 14 | 8 | |
| AF1012LAU7 | 12 | 5 ̴ 7 / 19 | 178 / 7 | 150 | 750 | 10 / / | |||||||
| AF1212LAM12 | Adossat | 12 | 5 ̴ 7 / 19 | 16 / 38 | 305 / 12 | 250 | 1.200 | 400 | 15 / 18 / 60 | 0,6 ̴ 1,2 | 14 ̴ 16 | 9 | |
| AF1212LAR12 | Separat | 12 | 5 ̴ 7 / 19 | 16 / 38 | 305 / 12 | 250 | 1.200 | 400 | 15 / 18 / 60 | 0,6 ̴ 1,2 | 14 ̴ 16 | 9 | |
| AF1212LAU12 | 12 | 5 ̴ 7 / 19 | 305 / 12 | 250 | 1.200 | 15 / / | |||||||
| AF2012LAR9 | Separat | 12 | 6 ̴ 8 / 22 | 228,6 / 9 | 1.200 | 17 / / | |||||||
| AF2012LAU9 | 12 | 6 ̴ 8 / 22 | 228,6 / 9 | 1.200 | 17 / / | ||||||||
| AF2012LAR12 | Separat | 12 | 7 ̴ 9 / 22 | 19 / 45 | 305 / 12 | 250 | 1.600 | 600 | 20 / 18 / 60 | 1 ̴ 2 | 14 ̴ 16 | 14 | |
| AF2012LAU12 | 12 | 6 ̴ 8 / 22 | 305 / 12 | 250 | 1.500 | 20 / / | |||||||
| AF1024LAM7 | Adossat | 24 | 3 ̴ 4 / 10 | 16 / 38 | 178 / 7 | 150 | 750 | 400 | 10 / 14 / 45 | 0,5 ̴ 1 | 12 ̴ 14 | 8 | |
| AF1024LAR7 | Separat | 24 | 3 ̴ 4 / 10 | 16 / 38 | 178 / 7 | 150 | 750 | 400 | 10 / 14 / 45 | 0,5 ̴ 1 | 12 ̴ 14 | 8 | |
| AF1024LAU7 | 24 | 3 ̴ 4 / 10 | 178 / 7 | 150 | 750 | 10 / / | |||||||
| AF1224LAM12 | Adossat | 24 | 3 ̴ 4 / 10 | 16 / 38 | 305 / 12 | 250 | 1.200 | 400 | 15 / 18 / 60 | 0,6 ̴ 1,2 | 14 ̴ 16 | 9 | |
| AF1224LAR12 | Separat | 24 | 3 ̴ 4 / 10 | 16 / 38 | 305 / 12 | 250 | 1.200 | 400 | 15 / 18 / 60 | 0,6 ̴ 1,2 | 14 ̴ 16 | 9 | |
| AF1224LAU12 | 24 | 3 ̴ 4 / 10 | 305 / 12 | 250 | 1.200 | 15 / / | |||||||
| AF2024LAR9 | Separat | 24 | 6 ̴ 8 / 22 | 228,6 / 9 | 250 | 1.200 | 17 / / | ||||||
| AF2024LAU9 | 24 | 3 ̴ 4 / 11 | 228,6 / 9 | 250 | 1.200 | 17 / / | |||||||
| AF2024LAR12 | Separat | 24 | 3 ̴ 5 / 11 | 19 / 45 | 305 / 12 | 250 | 1.600 | 600 | 20 / 18 / 60 | 1 ̴ 2 | 14 ̴ 16 | 14 | |
| AF2024LAU12 | 24 | 3 ̴ 5 / 11 | 305 / 12 | 250 | 1.500 | 20 / / | |||||||
| CRA0212LAR12 | Separat | 12 | 10 ̴ 12 / 32 | 305 / 12 | 250 | 2.300 | 29 / / | - | |||||
| CRA0224LAR12 | Separat | 24 | 5 ̴ 6 / 16 | 305 / 12 | 250 | 2.300 | 29 / / | - | |||||
| Mides | Cilindres (LAM i LAR) / marges requerits |
Hidràuliques-lineals Adossades (LAM) |
Hidràuliques-lineals Separades (LAR) |
||||||||||
|
|
||||
|
|||||
|
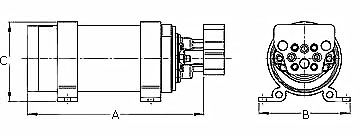
Bombes de Funcionament Constant tipus CRA | ||||||
| Prospecte | |||||||
 |
Les bombes de funcionament continu, CR (Constant Running), funcionen a partir de posar en marxa el pilot automàtic o el 'joystick' manual donant pressió hidràulica constantment que es conduïda al cilindre del timó via les electro-vàlvules de govern. El grup de bombes CRA són molt fiables, silencioses i eficients que donen milers d'hores de funcionament sense necessitat de manteniment. Es basen en un motor de contínua que gira constantment fent girar una bomba de pinyons i s'utilitzen com a unitat de força en iots grossos o mercants petits. Es poden fer servir en cilindres de govern de fins a 1.000 Cm3 (60 polzades3). Estan dissenyades de manera modular que permet canviar fàcilment la part de la bomba o la part del motor sense tècniques especials. Inclouen un relé d'engegament, un LED de funcionament, un bloc d'aixetes de pas per aïllar-la si cal, de la resta del circuït hidràulic i sense cap canonada externa. A l'hora d'escollir la bomba convé escollir el model que permeti un temps de virada del timó de topall a topall entorn dels 15 segons, tenint present que durant els primers minuts el rendiment és del 80%. |
|
|||||
| Joc de Bomba CRA bàsica | Estan disponibles jocs o conjunts de bombes CRA amb el cilindre apropiat per a facilitar les instal·lacions | ||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Accessoris | Preferible demanar-los al fer la comanda de la bomba | |||||||||
| Manòmetre | ||||||||||
| Vàlvula de seguretat | ajustable de 50 a 1.200 psi (de 4 a 85 bars) | |||||||||
| F | Control de Flux | disponible pel model de 2 litres; permet l'ajust des de 1,3 a 2 litres/minut (0,3 a 0,4 gpm) | ||||||||
| _____________________________ | ||||
| Jocs, Conjunts Hidràulics CR-Lineals |
| Model /Codi | Tensió (V) | Consum Normal / Pic(A) | Flux constant (Cm3/min) | Accionador / Elevació (Ømm/ mm) | Parell (Nm) | Empenta (Kg) | Braç Acc. (mm/") | Braç Canya (mm) | PVP (€) |
| OCTAFCRA0212LAR12 | 12 | 10 ̴ 12 / 32 | 2.000 | 19 / 45 | 2.300 | 850 | 305/12 | 250 | |
| OCTAFCRA0224LAR12 | 24 | 5 ̴ 6 / 16 | 2.000 | 19 / 45 | 2.300 | 850 | 305/12 | 23 | |
| *2 Vaixell amb la màxima càrrega | |||||||||
| Inclouen: | |||||||||
| OCTAFCRA0212 | OCTAFCRA0224 | Bomba CRA de 12 V o 24 V de 2 litres | |||||||
| Cilindre separat | Cilindre de 45 mm d'alçada, Ø19 mm, i 305 mm de braç | ||||||||
| Vàlvula Bypass | Vàlvula de bypass 12 o 24 V(a la mateixa tensió que la bomba CRA) | ||||||||
 Conjunt Bomba + Pistó + Vàlvula de Bypass + Mànegues |
|
|||||||||||||
|
Bombes de Funcionament Constant tipus CRB | ||||||
| Prospecte | |||||||
 Bomba bàsica tipus CRB |
Les bombes Octopus del tipus CRB són bombes de motor elèctric i funcionament constant robustes i potents que s'utilitzen en sistemes amb 'joystick' i per a pilots automàtics en grans iots i vaixells mercants. Són molt fiables, silencioses i eficients que donen moltes hores de servei sense necessitat de manteniment. Es basen en una bomba de funcionament constant de pinyons i un motor de contínua o d'alterna per atacar a pistons de fins a 3.500 Cm3 (200 polzades3 )de volum. Estan dissenyades de manera modular per permetre canviar fàcilment la part de la bomba o la part del motor sense tècniques especials. Inclouen una vàlvula de pressió ajustable de seguretat, un manòmetre sense canonada externa. A l'hora d'escollir la bomba convé escollir el model que permeti un temps de virada del timó de topall a topall entorn dels 15 segons Entre les opcions, el regulador de flux permet una reducció de fins al 65% del flux màxim i amb la segona velocitat fa que la bomba treballi normalment en la velocitat lenta i s'activi la 2ª velocitat, la ràpida, amb una electro-vàlvula auxiliar útil en les maniobres amb el 'joystick'. |
Escollir la bomba |
|||||
| Model | Flux | Tensió del motor | Tensió de l'Electro-vàlvula | Opcions | ||||||||||||||||||||||||||||||||||||||||||||||||
| CRB |
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||
| Exemple: CRB-02-12-12-A → Bomba bàsica CRB de 2 litres amb motor i electro-vàlvules a 12Vcc | |||||||||||||||||||||||||||||||
| Grup de bombes CRB a 12 V (Els Altres models tenen preus similars als de per 12 V) | ||||||||||||
@ 12V |
Codi | PVP (€) | Codi | PVP (€) | Codi | PVP (€) | ||||||
| CRB021212A | CRB021212B | CRB021212C | ||||||||||
| CRB031212A | CRB031212B | CRB031212C | ||||||||||
| CRB041212A | CRB041212B | CRB041212C | ||||||||||
| CRB061212A | CRB061212B | CRB061212C | ||||||||||
| CRB081212A | CRB081212B | CRB081212C | ||||||||||
| CRB101212A | CRB101212B | CRB101212C | ||||||||||
| CRB121212A | CRB121212B | CRB121212C | ||||||||||
|
|
||||
|
|||||
  |
Unitats Mecàniques Giratòries del Lloc de Comandament | |||||
Prospecte |
||||||
|
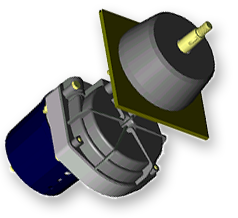
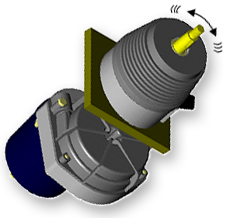
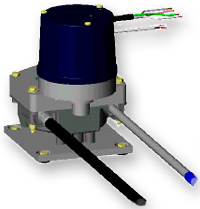
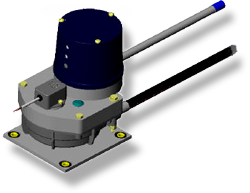
Les unitats mecàniques del lloc de comandament substitueixen el sistema des de darrere del volant timoner del sistema de govern manual en motores amb sistemes de cable "push-pull". Aquestes unitats donen una solució professional i combinada de govern manual i de unitat de força del pilot automàtic de manera que no queda res lleig a la vista. La Unitat d'Eix Recte (S)es munta darrere del taulell de comandament i és directament compatible amb el sistema Morse 290 de govern però ve amb el seu propi joc de caràtula. En la majoria dels casos es pot aprofitar el mateix cable de govern i el volant timoner del vaixell. La Unitat Reclinable (T) també es munta darrere del taulell de comandament reemplaçant la reclinable manual, o com a solució quan la unitat d'eix recte no disposa de prou fondària dins del piló o habitacle darrere del taulell del pont de govern. Aquesta unitat permet donar una inclinació més vertical a la unitat de força respecte de l'eix del volant timoner reduint la fondària requerida. Està preparada per les terminacions del cable Teleflex SH91800 o SH91800 o compatibles amb les timoneries manuals reclinables. Estan disponibles adaptadors de cables i separadors per a reduir l'espai requerit dins del piló. |
 |
||||
| 1- Unitat d'Eix Recte tipus S │2 - Unitat d'eix Reclinable tipus T | ||||||
| Model / Tipus | Tensió (Vcc) | Consum mig / pic (A) | Braç (mm/") | Braç Canya (mm)/" | Parell màxim Timó (Nm) | Empenta màxima (Kg) | Temps topall a topall (seg) | Consum embrague (A) | Elecció del Vaixell | Pes (Kg) | PVP (€) |
| AFMDMSW_/_S | 12 | 2 ̴ 4 / 6 | 215 / 8,5 *1 | *2 | 250 *3 | 136 | 12 ̴ 15 | 0,85 | *4 | 5,5 | |
| AFMDTPW_ /_T | 12 | 2 ̴ 4 / 6 | 215 / 8,5 *1 | *2 | 250 *3 | 136 | 12 ̴ 15 | 0,85 | *4 | 5,5 | |
| *1 Mida estàndard en motors (emprat per Teleflex, etc.) │ *2 Depèn del joc emprat i la timoneria │ *3 Amb el joc OC15SUK19 │ *4 Timoneries amb cable "push-pull" (normalment fins a 9m d'eslora) | |||||||||||
| AFMDMSRW | El AFMDMSW d'eix recte amb sensor de posició de timó | - | |||||||||
| AFMDTPRW | El AFMDTPW d'eix reclinable amb sensor de posició de timó | - | |||||||||
|
|||||||||||||
|
|||||||||||||
|
|||||||||||||
| Catàleg general per esportius | |
||||||||||||
 |
|
|
|
||
|
|||||
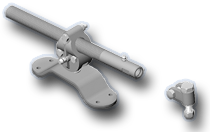
| Unitat Mecànica Remota per a Velers | |||||
 |
Prospectes |
||||
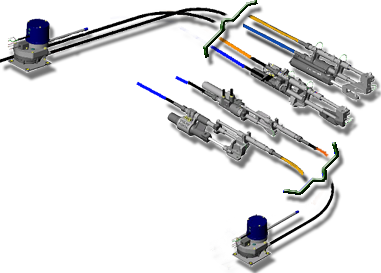
La Unitat de Força Remota Octopus per a velers fa fàcil i econòmica la instal·lació del pilot automàtic en vaixells velers lleugers governats per cable o canya. Aquesta unitat és molt sensible i ofereix poca resistència al maniobrar manualment quan el pilot està aturat cosa que el fa molt adequat per vaixells de regates. Al no estar el motor junt amb l'accionador es necessita menys espai en la zona de la canya o sector lo que facilita la instal·lació en els velers moderns de mida petita i mitjana, i així poder col·locar aquest motor en un indret més convenient sigui en posició horitzontal o vertical Es recomana per a Velers de fins a 11 metres (37 peus) d'eslora amb un desplaçament màxim de 6.500 Kg. |
 |
||||
 |
La unitat està composta per la unitat de força remota tipus R (motor), el cable que transfereix la força, i l'accionador que s'acobla a la canya o sector. El sensor de posició del timó es munta a costat del motor del remot i es configura fàcilment, si s'escau, per la gran majoria de pilots automàtics. |
||||
| Model | Tensió (Vcc) | Consum mig / pic (A) | Braç (mm/") | Braç Canya (mm)/" | Parell màxim Timó (Nm) | Empenta màxima (Kg) | Temps topall a topall (seg) | Consum embrague (A) | Desplaçament / Eslora màxims (Tones/m/peus) | Pes (Kg) | PVP (€) |
| MDRSRW-SYS | 12 | 2,5 / 7 | 305 / 12 | 254 / 10 | 450 | 180 | 12 ̴ 15 | 0,85 | 6,5 / 11 / 37 | * | |
| Inclou: | |||||||||||
| AFMDRSRW | Unitat de força remota, tipus R, de braç de 305 mm, 12", (sense sensor de posició de timó) | 5,5 | |||||||||
| OC15211-6 | Cable "push-pull" de 1,829 metres (6 peus) de llargària, braç de 305 mm (12 polzades) | 1,4 | |||||||||
| OC15SUK1912 | Accionador lineal per veler de braç de 305 mm (12 polzades) | 1,4 | |||||||||
| Alternatiu: | Altra unitat de força complerta (excepte RFB) | ||||||||||
| MDRESYS-E | Conjunt universal per a velers o motors d'interior per a connectar un cable de govern a la canya o al quadrant de 216 mm (8,5 polzades) de braç (sense sensor de posició de timó) veure'n els detalls | ||||||||||
| Normalment cal afegir-hi un: | Mòduls Sensors de Posició del Timó (RFB) - (41 dens per velers!!) per l'accionador de 305 mm (12 polzades) | ||||||||||
| OC15SUK27 | Joc Universal per a qualsevol versió de pilot automàtic | ||||||||||
| OC15SUK27A | Joc pel pilot automàtic Comnav, Si-tex | ||||||||||
| OC15SUK27B | Joc pel pilot automàtic Autohelm - Raymarine | ||||||||||
| OC15SUK27C | Joc pel pilot automàtic TFX - Morse | Obsolet | |||||||||
| OC15SUK27D | Joc pel pilot automàtic Simrad *, Coursemaster | ||||||||||
| OC15SUK27E | Joc pel pilot automàtic TMQ, Furuno, Navman, Garmin | ||||||||||
| OC15SUK83 | Joc de conversió resistència-freqüència. Necessari en pilots Simrad | ||||||||||
| * Els pilots automàtics Simrad requereixen la seva caixa d'interfície OC15SUK83 amb el OC15SUK27D | _________ | ||||||||||
|
|
||||
|
|||||
| Unitat Mecànica Remota per Vaixells amb Timoneria de Cues. | ||||||
| Prospecte | ||||||
 |
Els vaixells de cues són motores que es caracteritzen per a disposar d'una timoneria assistida hidràulicament i ser la mateixa cua que fa alhora de motor propulsor i timó. La unitat mecànica remota Octopus per cues està composta per tres parts: La unitat motriu que inclou el motor elèctric, l'embragatge i a la qual normalment cal afegir-li el sensor de posició del timó, el cable transmissor tipus "push-pull" i l'accionador /adaptador al model de cua. Octopus disposa de varietat d'adaptadors segons la marca i model de la cua. Amb aquesta unitat Octopus, sobre la cua només hi va instal·lat l'accionador que de manera esvelta actua sobre el mateix accionador procedent del govern manual. La unitat motriu queda apart a l'altre extrem del cable per a ser ubicada en una zona més convenient. |
 |
||||
 |
 |
|||||
|
|
|||||||||||||||||||||||||||
| Jocs, conjunts d'unitats accionadores per a embarcacions de cues | PVP () | |
| MDRESYS-A6 | Conjunt per cues Mercruiser DHB des de 1994, Diesel USA SX des de 1997 i tots els Volvo de benzina (cable 6 peus- un motor) | |
| Inclou: | ||
| AFMDRERW | Unitat motriu; cal escollir-li el sensor de posició del timó convenient | |
| OC15SUK12B | Joc d'Accionador sobre la cua per Mercruiser DHB des de 1994 i Volvo Gas SX & DP-S & Diesel SX des de 1997 | |
| OC15109-6 | Cable de govern estàndard de 1,83 m ( 6 peus) | |
| MDRESYS-A9 | Conjunt per cues Mercruiser DHB des de 1994, Diesel USA SX des de 1997 i tots els Volvo de benzina (cable 9 peus - dos motors) | |
| MDRESYS-B | Conjunt per cues Volvo Diesel DP des de 1994 i Mercruiser Saginaw fins 1993 (6 peus per un o dos motors) | |
| Inclou: | ||
| AFMDRERW | Unitat motriu; cal escollir-li el sensor de posició del timó convenient | |
| OC15SUK12C | Joc d'Accionador sobre la cua per Volvo Diesel DP des de 1994 i Mercruiser Saginaw fins 1993 | |
| OC15109-6 | Cable de govern estàndard de 1,83 m ( 6 peus) | |
| Normalment cal afegir-hi un: | Mòduls Sensors de Posició del Timó (RFB) - (36 dens per motores!!) per l'accionador de 216 mm (8,5 polzades) Les noves unitats de força utilitzen 41 dents | |
| OC15SUK06 | Joc Universal per a qualsevol versió de pilot automàtic | |
| OC15SUK06A | Joc pel pilot automàtic Comnav, Si-tex | |
| OC15SUK06B | Joc pel pilot automàtic Autohelm - Raymarine | |
| OC15SUK06C | Joc pel pilot automàtic TFX - Morse | Obsolet |
| OC15SUK06D | Joc pel pilot automàtic Simrad* - Coursemaster | |
| OC15SUK06E | Joc pel pilot automàtic TMQ, Furuno, Navman, Garmin | |
| OC15SUK83 | Joc de conversió resistència-freqüència. Necessari amb els pilots Simrad | |
| * Els pilots automàtics Simrad requereixen la caixa d'interfície OC15SUK83 amb el OC15SUL06D | ||
|
|
||||
|
|||||
| Unitat Mecànica Remota per Vaixells amb Motor Forabord. | ||||||
| Prospecte | ||||||
 |
Els conjunts d'unitats remotes per vaixells forabords d'Octopus es poden instal·lar en la majoria dels forabords més popular governats amb cable "push-pull". Es recomanen per vaixells que no superin els 40 nusos (74 Km/h) i no s'haurien d'instal·lar en vaixells la qual potència màxima del motor superi el marge màxim del vaixell especificat per l'astiller. |
|
||||
La instal·lació del conjunt permet l'addició d'un segon cable de govern que es pot fer servir perquè agafi el control el pilot automàtic quan està connectat a la unitat motriu remota d'Octopus o agafi el control el 'joystick' quan està connectat a la unitat motriu remota 'Intellisteer' d'Octopus. |
 |
|||||
|
|
|||||||||||||||||||||||||||
| Jocs, conjunts d'unitats accionadores per a embarcacions forabords | |||
| MDRESYS-C | Conjunt per Forabord Yamaha | * | |
| Inclou: | |||
| AFMDREW | Unitat motriu; (si cal el sensor de posició del timó, eculli el convenient) | ||
| OC15SUK15A | Joc d'Accionador forabord per Yamaha 115-220 | ||
| OC15109-6 | Cable de govern estàndard de 1,83 m ( 6 peus) | ||
| MDRESYS-D | Conjunt per Forabord Mercury, Mariner, Suzuki,... | * | |
| Inclou: | |||
| AFMDREW | Unitat motriu; (si cal el sensor de posició del timó, eculli el convenient) | ||
| OC15SUK15B | Joc d'Accionador forabord per Mercury, Mariner, Suzuki | ||
| OC15109-6 | Cable de govern estàndard de 1,83 m ( 6 peus) | ||
| Normalment Cal afegir-hi (en cada cas) |
Un Sensor de Posició del Timó: OC15SUK06; OC15SUK06A ... OC15SUK06H (veure els models) | ||
|
|
|
|||
|
|||||
| Unitat Mecànica Remota per Instal·lació en Vaixells amb Motor d'Interior o Velers | |||||||||
| Prospecte | |||||||||
 |
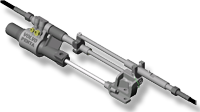
Les unitats remotes també es poden muntar en motores de motor interior o velers. Ofereixen l'avantatge de necessitar un mínim d'espai en l'indret del sector o la canya ja que el motor Octopus, l'embragatge i el sensor de posició del timó es munten separadament i formen un sol bloc que transmet la seva potència al timó amb un cable "push-pull" estàndard de 183 Cm (6 peus) encara que també n'hi han de 3 i 4 metres, si cal. L'accionador estàndard de 216 mm (8,5 polzades) al final del cable aplica la força a la canya o sector. Aquesta unitat de força pot estalviar temps d'instal·lació i solucionar la papereta quan l'espai és decissiu. |
|
|||||||
|
 |
||||||||
| Joc, conjunt d'unitat accionador per a embarcacions amb motor d'interior o velers | |||
| MDRERW /Universal | Conjunt universal per a motors d'interior o velers de 216 mm (8,5 polzades) de braç | ||
| Inclou: | |||
| AFMDRERW | Unitat motriu; cal escollir-li el sensor de posició del timó convenient | ||
| OC15SUK19 | Joc d'Accionador universal | ||
| OC15109-6 | Cable de govern estàndard de 1,83 m ( 6 peus) | ||
| Normalment cal afegir-hi (en cada cas) |
Un Sensor de Posició del Timó: OC15SUK06; OC15SUK06A ... OC15SUK06H (veure els models) | ||
 |
|
||||
|
|||||